
「Raspberry Pi 3」からBME280を使うために、スイッチサイエンスのサンプルプログラムをPython3に合わせて修正したときのメモ。
環境
・Raspberry Pi 3 Model B+
・BME280(温湿度・気圧センサモジュール)
・Python ver.3.4.2
・smbus2 ver.0.1.3
smbus2

Client Challenge
pypi.python.org
BME280(スイッチサイエンス)
BME280搭載 温湿度・気圧センサモジュール
BME280搭載の環境センサモジュール。温度、湿度と気圧を測定可能。
www.switch-science.com
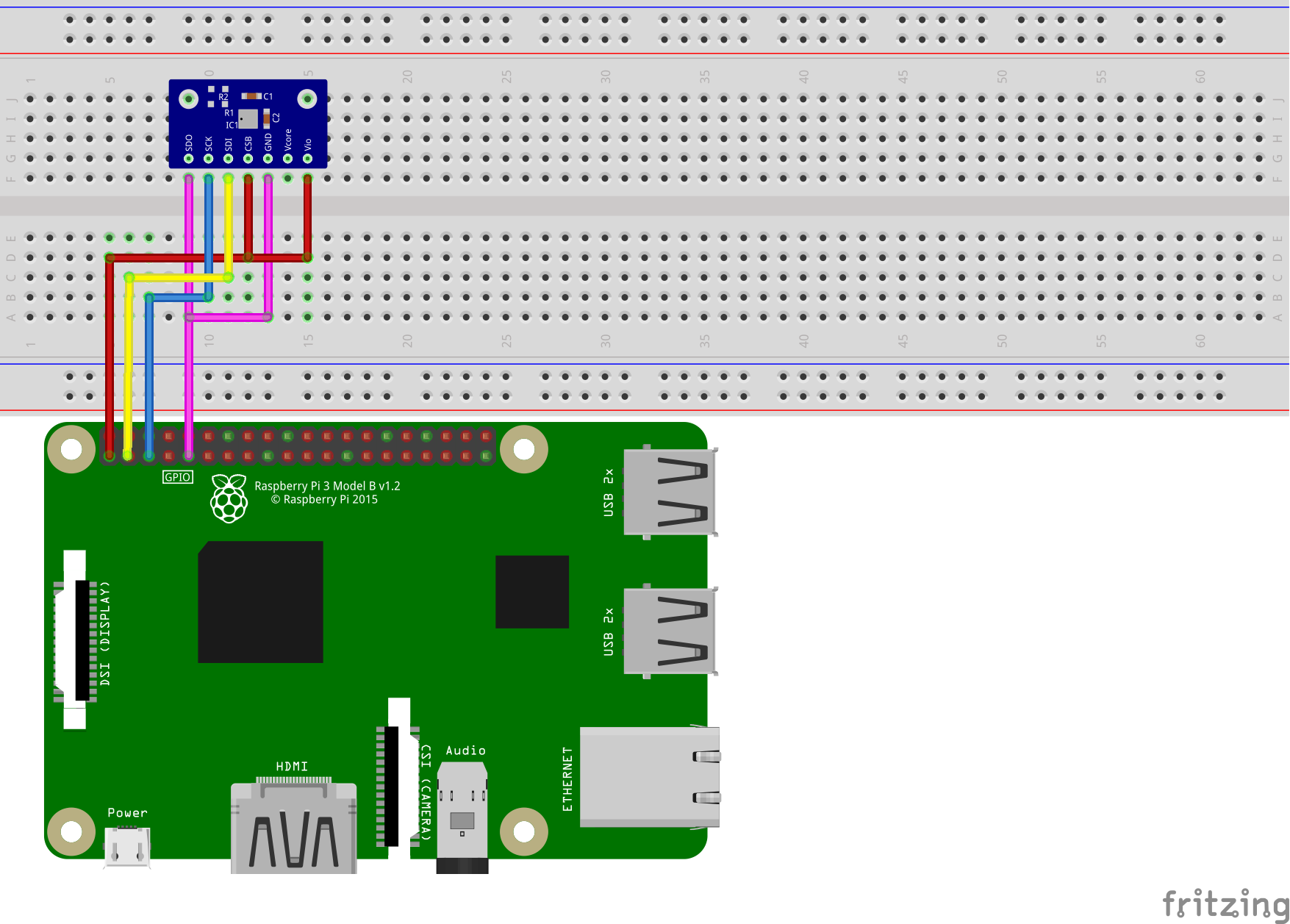
配線図
Pythonとsmbus2のインストール
sudo apt-get install python3-pip python3-dev 確認する。 python3 -V whereis python3 sudo apt-get install i2c-tools wget https://pypi.python.org/packages/7a/f0/5ba99ca403638d227eb92948f4acf54eba741e4bbd5b4494e441e39ae1d3/smbus2-0.1.3.tar.gz#md5=e122148cbb101a068723525ec4e28c59 tar -zxvf smbus2-0.1.3.tar.gz cd smbus2-0.1.3 sudo python3 setup.py install
I2Cを有効にする
sudo raspi-config 以下の項目を有効にする。 「7 Advanced Options」→「A7 I2C」
BME280のアドレスを調べる
引数は「0」、又は「1」。
「Raspberry Pi」のリビジョンによって異なる。
「/dev/i2c-0」ならば「0」。
「/dev/i2c-1」ならば「1」。
sudo i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- 76 --
接続テスト
sudo python3 ./bme280_sample.py
ソース
スイッチサイエンスのサンプルプログラムをPython3で動作するようにしたもの。
また、CSVファイルにも記録するように修正してある。
修正・追加は、
・「print」文を「Python3」の文法に合わせて修正。
・「import csv」の追加。
・「import datetime」の追加。(CSVファイル名に使用する。)
・「readData」関数内のCSVファイルに保存する部分。
# -*- coding: utf-8 -*-
from smbus2 import SMBus
import time
import datetime
import csv
#set instance
bus_number = 1
i2c_address = 0x76
bus = SMBus(bus_number)
digT = []
digP = []
digH = []
t_fine = 0.0
def writeReg(reg_address, data):
bus.write_byte_data(i2c_address,reg_address,data)
def get_calib_param():
calib = []
for i in range (0x88,0x9F+1):
calib.append(bus.read_byte_data(i2c_address,i))
calib.append(bus.read_byte_data(i2c_address,0xA1))
for i in range (0xE1,0xE7+1):
calib.append(bus.read_byte_data(i2c_address,i))
digT.append((calib[1] << 8) | calib[0])
digT.append((calib[3] << 8) | calib[2])
digT.append((calib[5] << 8) | calib[4])
digP.append((calib[7] << 8) | calib[6])
digP.append((calib[9] << 8) | calib[8])
digP.append((calib[11]<< 8) | calib[10])
digP.append((calib[13]<< 8) | calib[12])
digP.append((calib[15]<< 8) | calib[14])
digP.append((calib[17]<< 8) | calib[16])
digP.append((calib[19]<< 8) | calib[18])
digP.append((calib[21]<< 8) | calib[20])
digP.append((calib[23]<< 8) | calib[22])
digH.append( calib[24] )
digH.append((calib[26]<< 8) | calib[25])
digH.append( calib[27] )
digH.append((calib[28]<< 4) | (0x0F & calib[29]))
digH.append((calib[30]<< 4) | ((calib[29] >> 4) & 0x0F))
digH.append( calib[31] )
#fixed get param
#T2-T3
for i in range(1,3):
if digT[i] & 0x8000:
digT[i] = (-digT[i] ^ 0xFFFF) + 1
#P2-P9
for i in range(1,9):
if digP[i] & 0x8000:
digP[i] = (-digP[i] ^ 0xFFFF) + 1
#H2,H4,H5
for i in [1,3,4]:
if digH[i] & 0x8000:
digH[i] = (-digH[i] ^ 0xFFFF) + 1
def readData():
data = []
for i in range (0xF7, 0xF7+8):
data.append(bus.read_byte_data(i2c_address,i))
pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4)
temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4)
hum_raw = (data[6] << 8) | data[7]
#
# Record CSV file
#
data_dir = "./"
record_datetime = datetime.datetime.now()
record_file_name = 'bme280-' + record_datetime.strftime('%Y%m%d') + '.csv'
#record_time = record_datetime.strftime('%X')
record_time = record_datetime.strftime('%Y/%m/%d %H:%M:%S')
t = compensate_T(temp_raw)
p = compensate_P(pres_raw)
h = compensate_H(hum_raw)
with open(data_dir + record_file_name, mode='a', encoding='utf-8', newline='\n') as csvfile:
writer = csv.writer(csvfile, lineterminator="\n")
writer.writerow([record_time, t, p, h])
def compensate_P(adc_P):
global t_fine
pressure = 0.0
v1 = (t_fine / 2.0) - 64000.0
v2 = (((v1 / 4.0) * (v1 / 4.0)) / 2048) * digP[5]
v2 = v2 + ((v1 * digP[4]) * 2.0)
v2 = (v2 / 4.0) + (digP[3] * 65536.0)
v1 = (((digP[2] * (((v1 / 4.0) * (v1 / 4.0)) / 8192)) / 8) + ((digP[1] * v1) / 2.0)) / 262144
v1 = ((32768 + v1) * digP[0]) / 32768
if v1 == 0:
return 0
pressure = ((1048576 - adc_P) - (v2 / 4096)) * 3125
pressure = (pressure * 2.0) / v1
v1 = (digP[8] * (((pressure / 8.0) * (pressure / 8.0)) / 8192.0)) / 4096
v2 = ((pressure / 4.0) * digP[7]) / 8192.0
pressure = pressure + ((v1 + v2 + digP[6]) / 16.0)
print ("pressure : %7.2f hPa" % (pressure/100))
return pressure/100
def compensate_T(adc_T):
global t_fine
v1 = (adc_T / 16384.0 - digT[0] / 1024.0) * digT[1]
v2 = (adc_T / 131072.0 - digT[0] / 8192.0) * (adc_T / 131072.0 - digT[0] / 8192.0) * digT[2]
t_fine = v1 + v2
temperature = t_fine / 5120.0
print ("temp : %-6.2f ℃" % (temperature))
return temperature
def compensate_H(adc_H):
global t_fine
var_h = t_fine - 76800.0
if var_h != 0:
var_h = (adc_H - (digH[3] * 64.0 + digH[4]/16384.0 * var_h)) * (digH[1] / 65536.0 * (1.0 + digH[5] / 67108864.0 * var_h * (1.0 + digH[2] / 67108864.0 * var_h)))
else:
return 0
var_h = var_h * (1.0 - digH[0] * var_h / 524288.0)
if var_h > 100.0:
var_h = 100.0
elif var_h < 0.0:
var_h = 0.0
print ("hum : %6.2f %" % (var_h))
return var_h
def setup():
#changed settting to indoor navigation
osrs_t = 1 #Temperature oversampling x 1
osrs_p = 5 #Pressure oversampling x 16
osrs_h = 2 #Humidity oversampling x 2
mode = 3 #Normal mode
t_sb = 0 #Tstandby 0.5ms
filter = 4 #Filter 16
spi3w_en = 0 #3-wire SPI Disable
ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode
config_reg = (t_sb << 5) | (filter << 2) | spi3w_en
ctrl_hum_reg = osrs_h
writeReg(0xF2,ctrl_hum_reg)
writeReg(0xF4,ctrl_meas_reg)
writeReg(0xF5,config_reg)
setup()
get_calib_param()
if __name__ == "__main__":
try:
readData()
except KeyboardInterrupt:
pass


Comments